Visual Inertial Navigation
Software: Visual Inertial Navigation
Software: Visual Inertial Navigation
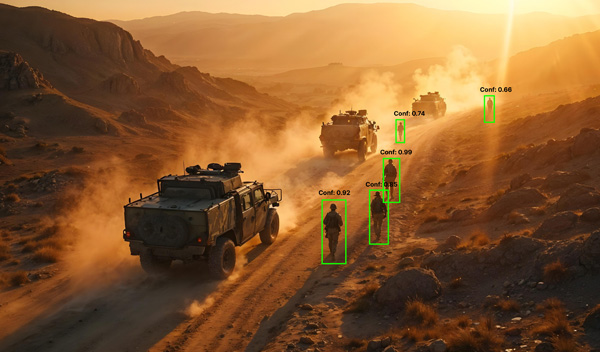
State-of-the-Art Visual Inertial Navigation (VIN) represents a cutting-edge approach to autonomous navigation that integrates high-performance visual sensors (cameras) with inertial measurement units (IMUs, consisting of accelerometers and gyroscopes) to provide robust, real-time position and motion tracking in environments where traditional GPS-based navigation is unavailable or unreliable.

© 2025. Davaro Defence Systems․ All rights reserved.
Find us on:



.svg)
.svg)
.svg)